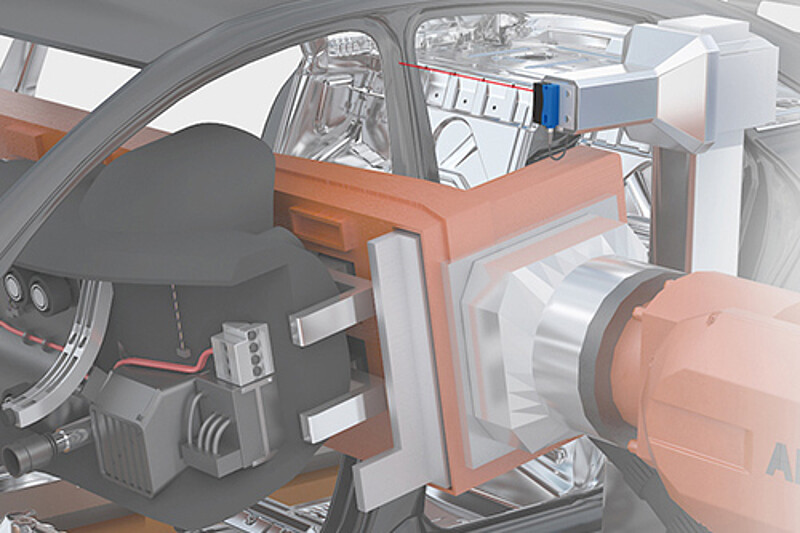
车身必须准确地停在预定位置。这是确保通过机器人顺利安装的唯一方法,机器人必须将驾驶舱引导到A柱和B柱之间的车辆中。车身应停止的正确位置由Micro-Epsilon的optoNCDT ILR1030-8/LC1激光传感器确定。由于响应时间短,它们特别适合于这些应用和其他类似应用。传感器与驾驶舱安装用的装配机器人位于装配线的同一侧。在车辆 A 柱和 B 柱的高度和大约 600 至 700 毫米的距离处以 100 Hz 的频率进行测量。