在增材制造中,需要对不同的参数进行监控。特别是对制造质量要求较高的场合,Micro-Epsilon 的传感器可以监控定位、粉末应用和部件尺寸测量等任务。激光传感器、激光扫描仪、电涡流传感器和电容位移传感器只是其中的一部分。
Micro-Epsilon的激光扫描仪用于在激光熔覆过程中检测轮廓。这些扫描仪在焊缝沉积前精确检测物体的轮廓。3D数据用于精确确定焊头的导向。
在基于激光熔覆或激光沉积焊接的涂层工艺中,Micro-Epsilon的激光扫描仪可监控涂层。其高分辨率可实现对焊接沉积的可靠监控。
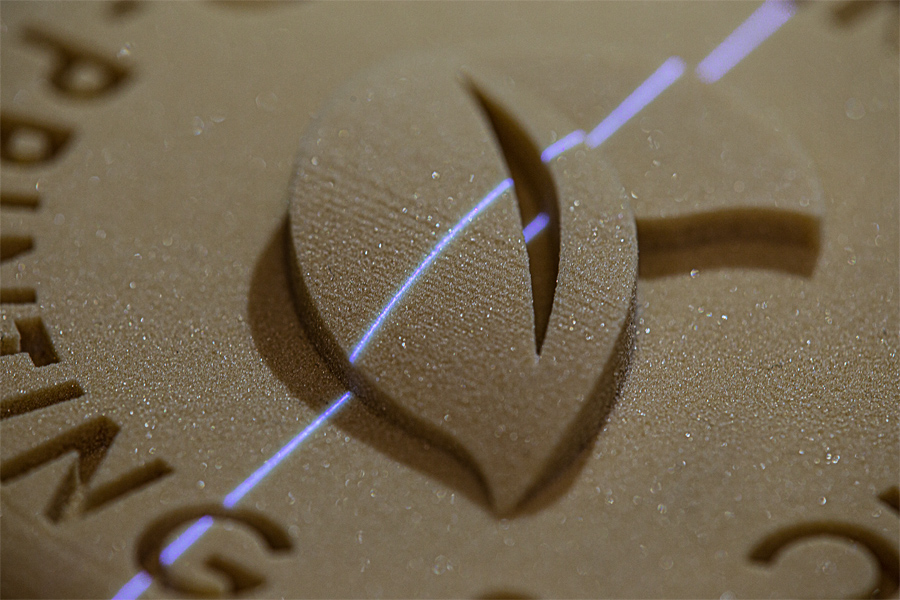
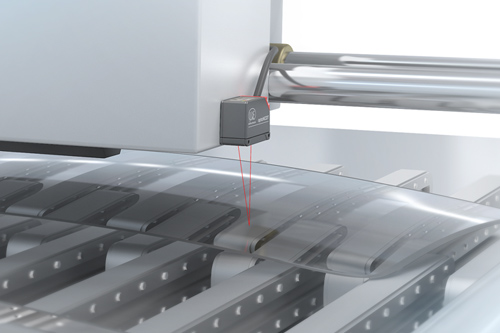
为了监控生产质量,使用蓝色激光扫描仪对印刷部件进行检测。部件通过一个移动装置从扫描仪前移动。根据激光轮廓生成3D图像,然后与 CAD 数据进行比较。
在印刷过程中,打印头的精确高度对最终产品质量至关重要。针对不同材料表面的高速距离测量和可靠的边缘检测支持快速调整过程。
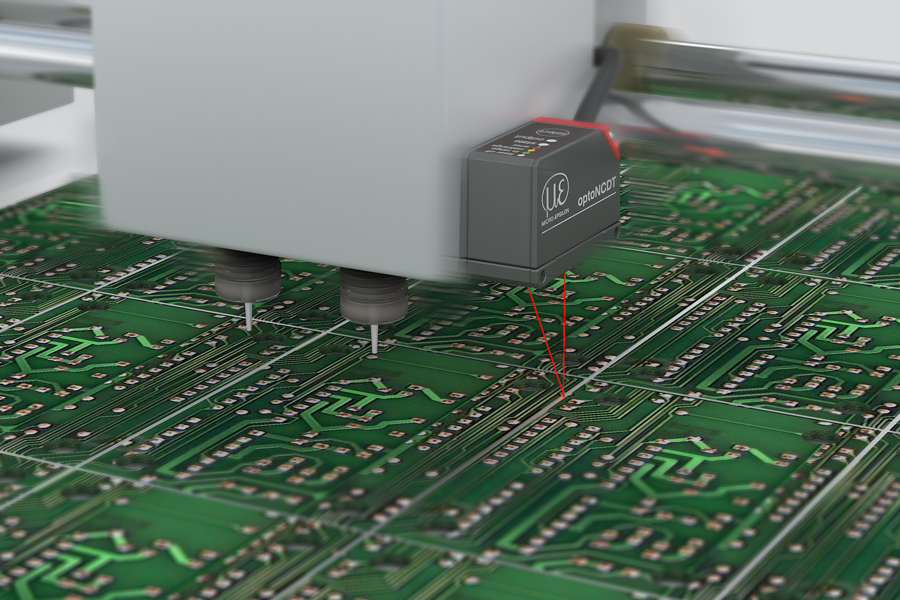
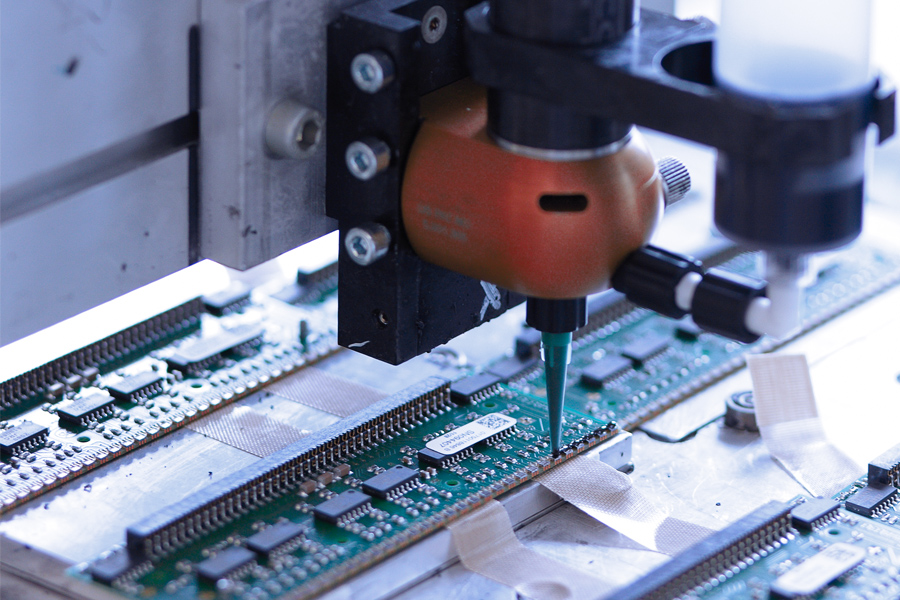
在电路板印刷、焊接和装配过程中,印刷头的精确高度定位对于实现完美的工艺至关重要。optoNCDT 激光传感器可实现打印头的精确定位。无论表面反射如何,这些传感器都能提供精确的测量结果,用于调整高度和检测边缘。
回流焊接工艺结束后,会在某些点上涂胶以保护电路。胶珠厚度是一个关键因素,可以使用激光传感器进行可靠检测。
在选择性激光烧结工艺中,每次熔化周期结束后,建筑平台都会降低一个确定值,该值与所需的 Z 分辨率相对应。电涡流位移传感器会对建筑平台进行监控,以便打印头能够平行对准。
为了计算机器人路径,scanCONTROL激光扫描仪确定需要焊接的区域。这些激光扫描仪提供高轮廓分辨率和轮廓频率,可实现快速修复。
电容位移传感器监测刮板的位置。两个同步传感器以高分辨率测量刮板的两端,提供倾斜角度的精确信息。这是为了确保粉床被最终刮掉。